一、决策树模型与学习
决策树是一种基本的分类与回归方法。决策树整体是一个树型结构,在分类的问题中,表示基于特征对实例进行分类的过程。可以认为是if-then的规则集合,也可以认为是定义在特征空间与类空间上的条件概率分布。
优点是模型具有可读性,分类速度快。决策树学习通常分为三个步骤:特征选择、决策树生成和决策树的修剪。
- 学习时,可以利用训练数据,根据损失函数的最小化原则建立决策树模型。
- 预测时,对新的数据,利用决策树模型进行分类。
1.1 决策树模型
定义1 (决策树)
分类决策树模型是一种描述对实例点进行分类的树型结构。由结点(node)和有向边(directed edge)组成。结点有两种类型:内部结点(internal node)和叶结点(leaf node)。内部结点表示一个特征或属性,叶节点表示一个类。
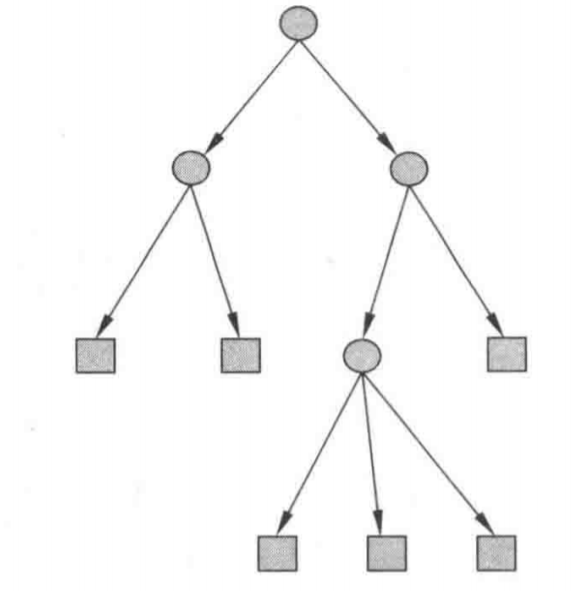
利用决策树分类,从根节点开始,对某一特征进行测试,根据分类结果,将其分配到其子节点;如此递归进行测试并分配,直到叶节点,最后将实例分配到叶节点的类中。图1-1是一个决策树的示意图,圆表示内部节点,方框表示叶节点。
1.2 决策树与if-then规则
由决策树的根节点到叶节点的每一条路径构建一条规则;路径上的内部节点的特征对应着规则的条件,而叶节点的类对应着规则的结论。决策树的路径或其对应的if-then规则结合具有一个重要的性质:互斥且完备。即,每一个实例都被一条路径或规则覆盖,而且只被一条路径或规则覆盖。
1.3 决策树与条件概率分布
决策树还表示为定义在给定的特征条件下的类的条件概率分布。这些条件概率分布定义在特征空间的一个划分上。决策树将特征空间划分为互不相交的单元(cell),并在单元上定义了一个类的概率分布。决策树的一条路径对应了划分中的一个单元。
假设 $X$ 为表示特征的随机变量,$Y$ 为表示类的随机变量,那么这个条件概率分布可以表示为 $P\left(Y|X\right)$。$X$ 的取值与给定的划分下单元的集合,$Y$ 取值于类的集合。各叶节点上的条件概率往往偏向某一个类的概率较大,决策树在分类时会将该实例分配到条件概率较大的那一类去。
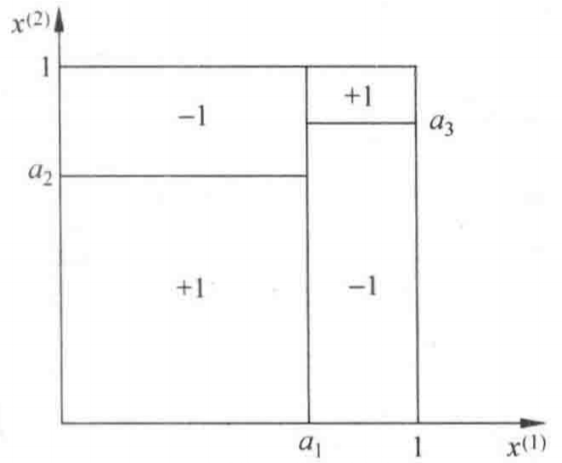
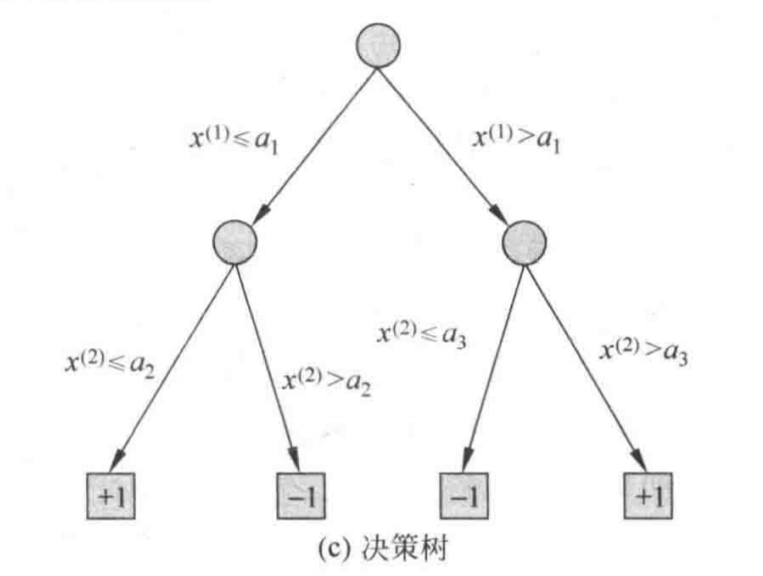
图1-2表示了一种特征空间的划分与与之对应的决策树。
1.4 决策树学习
假定给定训练数据集
$$
D=\left\{ \left( x_1,y_1 \right) ,\left( x_2,y_2 \right) ,\cdots ,\left( x_N,y_N \right) \right\}
$$
其中,$x_i=\left( x_{i}^{\left( 1 \right)},x_{i}^{\left( 2 \right)},\cdots ,x_{i}^{\left( n \right)} \right) ^{\text{T}}$ 为输入实例,$n$ 为特征个数,$y_i\in \left\{1,2,\cdots,K\right\}$ 为类标记,$i=1,2\cdots,N$,$N$ 为样本容量。决策树学习的目标是根据给定的训练数据集构建一个决策树模型,使其能够对新输入的实例进行正确分类。
决策树的本质是从训练数据集中归纳出一组分类规则。与训练集相符的决策树可能有多个,也可能没有。目标是构建一个与训练数据集向矛盾较小的决策树,并且具有很好的泛化能力。
决策树学习的损失函数通常是正则化的极大似然函数,学习策略的是以损失函数为目标函数的最小化。损失函数确定后,学习的目标变为在损失函数意义下的选择最优决策树的问题。因为从所有可能的决策树中选择合适的决策树属于 $NP$ 完全问题,因此实际中常常采用启发式方法,近似求解,这样得到的决策树为次最优的(sub-optimal)。
决策树的学习算法通常是一个递归地选择最优特征,并根据该特征对训练数据进行分割,使得各个子数据集有一个最好的分类过程。这个过程也就是特征空间的划分,也是决策树的构建过程。然后递归分类,直到所有训练数据子集基本都被正确分类,这样就生成了一颗决策树。
以上方法可能对训练数据集有一个很好的分类,但是对未知数据未必有很好的分类能力,很有可能发生过拟合的现象。因此我们需要对生成的树进行从叶到根进行剪枝,使树变得简单,由此拥有更好的泛化能力。具体做法是,去掉分类过于细致的叶节点,使其退回到父节点或更高的节点,然后将父节点或更高的节点变为叶节点。
二、特征选择
2.1 特征选择问题
特征选择在于选择对数据集有分类能力的特征,以此提高决策树的效率。通常特征选择的标准是信息增益或信息增益比。
2.2 信息增益
首先给出熵和条件熵的概念。
熵(entopy)是表示随机变量不确定性的度量。设 $X$ 是表示随机变量不确定性的度量。设 $X$ 是一个取有限个值的离散随机变量,其概率分布为 $P\left(X=x_i\right)=p_i, i=1,2,\cdots,n$ 则随机变量 $X$ 的熵定义为
$$
H\left(X\right) = -\sum_{i=1}^n{p_i}\log p_i
$$
若 $p_i=0$,则定义 $0\log 0=0$。通常上式的对数以 $2$ 或 $e$ 为底,这是熵的单位分别称为比特(bit)或纳特(nat)。由定义知,熵只依赖于 $X$ 的分布,与 $X$ 的取值无关,所以也将 $X$ 的熵记作 $H\left(p\right)$,即
$$
H\left(p\right)=-\sum_{i=1}^np_i\log p_i
$$
熵越大,随机变量的不确定性就越大。由定义可以验证
$$
0\le H\left(p\right)\le \log n
$$
当随机变量只取两个值时,例如 $1,0$ 时,即 $X$ 的分布为
$$
P\left(X=1\right)=p,\; P\left(X=0\right)=1-p,\; 0\le p\le 1
$$
熵为
$$
H\left(p\right)=-\log_2p-\left(1-p\right)\log_2\left(1-p\right)
$$
这时,熵 $H\left(p\right)$随概率 $p$ 变化的曲线如图1-3所示(单位为比特)。
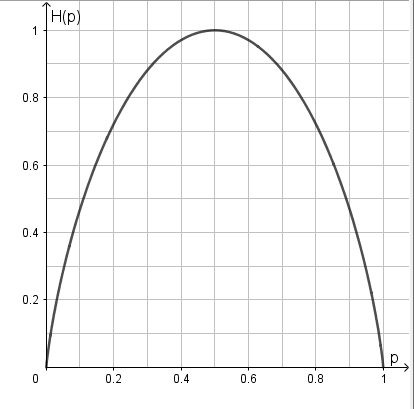
当 $p=0$ 或 $p=1$ 时 $H\left(p\right)=0$,随机变量完全没有不确定性。当 $p=0.5$ 时,$H\left(p\right)=1$,熵取值最大,随机变量的不确定性最大。
设有随机变量 $\left(X,Y\right)$,其联合概率分布为
$$
P\left(X=x_i,Y=y_i\right)=p_{ij},\; i=1,2,\cdots ,n; \; j=1,2,\cdots,m
$$
条件熵 $H\left(Y|X\right)$ 表示在已知随机变量 $X$ 的条件下随机变量 $Y$ 的不确定性。随机变量 $X$给定条件下随机变量 $Y$ 的条件熵 $H\left(Y|X\right)$,定义为 $X$ 给定条件下 $Y$ 的条件概率分布的熵对 $X$ 的数学期望
$$
H\left(Y|X\right)=\sum_{i=1}^n{p_iH\left(Y|X=x_i\right)}
$$
这里,$p_i=P\left(X=x_i\right)$,$i=1,2,\cdots,n$。
当熵和条件熵中的概率由数据估计(一般是极大似然估计)得到时,所对应的熵和条件熵分别称为经验熵和经验条件熵。规定 $0\log 0=0$。
信息增益表示得知特征 $X$ 的信息而使得类 $Y$ 的信息不确定性减小的程度。
定义2 (信息增益)
特征 $A$ 对训练数据集 $D$ 的信息增益 $g\left(D,A\right)$,定义为集合 $D$ 的经验熵 $H\left(D\right)$ 与特征 $A$ 给定条件下 $D$ 的经验条件熵 $H\left(D|A\right)$ 之差,即
$$
g\left(D,A\right)=H\left(D\right)-H\left(D|A\right)
$$
决策树学习应用信息增益准则作为选择特征。对于给定的数据集 $D$ 和特征 $A$,经验熵 $H\left(D\right)$ 表示对数据集 $D$ 进行分类的不确定性。而经验条件熵 $H\left(D|A\right)$ 表示在特征 $A$ 给定条件下对数据集 $D$ 进行分类的不确定性。而二者的差,即信息增益,就是由于特征 $A$ 而使得对数据集 $D$ 的分类的不确定性的减少程度。显然,对于同一个数据集的不同特征,往往都有不同的信息增益,而信息增益大的特征具有更强的分类能力。
算法 1(信息增益算法)
输入:训练数据集 $D$ 和特征 $A$,$\left| D \right|$ 为样本容量,设有 $K$ 个类 $C_k$,$k=1,2,\cdots,K$,$\left| C_k \right|$ 为属于 $C_k$ 的样本个数,$\sum_{k=1}^K{\left|C_k\right|}=\left|D\right|$。设特征 $A$ 有 $n$ 个不同的取值 $\left\{a_1,a_2,\cdots,a_n\right\}$,根据特征 $A$ 的取值将 $D$ 划分为 $n$ 个子集 $D_1,D_2,\cdots,D_n$,$\left|D_i\right|$ 为 $D_i$ 的样本个数,$\sum_{i=1}^n{\left|D_i\right|}=\left|D\right|$;
输出:特征 $A$ 对训练数据集 $D$ 的信息增益$g\left(D,A\right)$。
计算数据集 $D$ 的经验熵 $H\left(D\right)$;
$$
H\left( D \right) =-\sum_{k=1}^K{\frac{\left| C_k \right|}{\left| D \right|}\log _2}\frac{\left| C_k \right|}{\left| D \right|}
$$计算特征 $A$ 对数据集 $D$ 的经验条件熵 $H\left(D|A\right)$
$$
H\left( D |A\right) =\sum_{i=1}^n{\frac{\left| D_i \right|}{\left| D \right|}H\left( D_i \right)}=-\sum_{i=1}^n{\frac{\left| D_i \right|}{\left| D \right|}\sum_{k=1}^K{\frac{\left| D_{ik} \right|}{\left| D_i \right|}\log _2\frac{\left| D_{ik} \right|}{\left| D_i \right|}}}
$$
- 计算信息增益
$$
g\left(D,A\right)=H\left(D\right)-H\left(D|A\right)
$$
Python代码如下
def calc_H_D(trainLabelArr):
"""
计算数据集D的经验熵
:param trainLabelArr:当前数据集的标签集
:return: 经验熵
"""
# 初始化为0
H_D = 0
# 将当前所有标签放入集合中,这样只要有的标签都会在集合中出现,且出现一次。
# 遍历该集合就可以遍历所有出现过的标记并计算其Ck
# 这么做有一个很重要的原因:首先假设一个背景,当前标签集中有一些标记已经没有了,比如说标签集中
# 没有0(这是很正常的,说明当前分支不存在这个标签)。
# 计算Cl和D并求和时,由于没有0,那么C0=0,此时C0/D0=0,log2(C0/D0) = log2(0),事实上0并不在log的定义区间内,出现了问题
# 所以使用集合的方式先知道当前标签中都出现了那些标签,随后对每个标签进行计算,如果没出现的标签那一项就
# 不在经验熵中出现(未参与,对经验熵无影响),保证log的计算能一直有定义
trainLabelSet = set([label for label in trainLabelArr])
# 遍历每一个出现过的标签
for i in trainLabelSet:
# 计算|Ck|/|D|
# trainLabelArr == i:当前标签集中为该标签的的位置
# 例如a = [1, 0, 0, 1], c = (a == 1): c == [True, false, false, True]
# trainLabelArr[trainLabelArr == i]:获得为指定标签的样本
# trainLabelArr[trainLabelArr == i].size:获得为指定标签的样本的大小,即标签为i的样本
# 数量,就是|Ck|
# trainLabelArr.size:整个标签集的数量(也就是样本集的数量),即|D|
p = trainLabelArr[trainLabelArr == i].size / trainLabelArr.size
# 对经验熵的每一项累加求和
H_D += -1 * p * np.log2(p)
# 返回经验熵
return H_D
def calcH_D_A(trainDataArr_DevFeature, trainLabelArr):
"""
计算经验条件熵
:param trainDataArr_DevFeature:切割后只有feature那列数据的数组
:param trainLabelArr: 标签集数组
:return: 经验条件熵
"""
# 初始为0
H_D_A = 0
# 在featue那列放入集合中,是为了根据集合中的数目知道该feature目前可取值数目是多少
trainDataSet = set([label for label in trainDataArr_DevFeature])
# 对于每一个特征取值遍历计算条件经验熵的每一项
for i in trainDataSet:
# 计算H(D|A)
# trainDataArr_DevFeature[trainDataArr_DevFeature == i].size / trainDataArr_DevFeature.size:|Di| / |D|
# calc_H_D(trainLabelArr[trainDataArr_DevFeature == i]):H(Di)
H_D_A += trainDataArr_DevFeature[trainDataArr_DevFeature == i].size / trainDataArr_DevFeature.size \
* calc_H_D(trainLabelArr[trainDataArr_DevFeature == i])
# 返回得出的条件经验熵
return H_D_A
def calcBestFeature(trainDataList, trainLabelList):
"""
计算信息增益最大的特征
:param trainDataList: 当前数据集
:param trainLabelList: 当前标签集
:return: 信息增益最大的特征及最大信息增益值
"""
# 将数据集和标签集转换为数组形式
trainDataArr = np.array(trainDataList)
trainLabelArr = np.array(trainLabelList)
# 获取当前特征数目,也就是数据集的横轴大小
featureNum = trainDataArr.shape[1]
# 初始化最大信息增益
maxG_D_A = -1
# 初始化最大信息增益的特征
maxFeature = -1
# 信息增益的算法:
# 1.计算数据集D的经验熵H(D)
H_D = calc_H_D(trainLabelArr)
# 对每一个特征进行遍历计算
for feature in range(featureNum):
# 2.计算条件经验熵H(D|A)
# 由于条件经验熵的计算过程中只涉及到标签以及当前特征,为了提高运算速度(全部样本
# 做成的矩阵运算速度太慢,需要剔除不需要的部分),将数据集矩阵进行切割
# 数据集在初始时刻是一个Arr = 60000*784的矩阵,针对当前要计算的feature,在训练集中切割下
# Arr[:, feature]这么一条来,因为后续计算中数据集中只用到这个
# trainDataArr[:, feature]:在数据集中切割下这么一条
# trainDataArr[:, feature].flat:将这么一条转换成竖着的列表
# np.array(trainDataArr[:, feature].flat):再转换成一条竖着的矩阵,大小为60000*1(只是初始是
# 这么大,运行过程中是依据当前数据集大小动态变的)
trainDataArr_DevideByFeature = np.array(trainDataArr[:, feature].flat)
# 3.计算信息增益G(D|A) G(D|A) = H(D) - H(D | A)
G_D_A = H_D - calcH_D_A(trainDataArr_DevideByFeature, trainLabelArr)
# 不断更新最大的信息增益以及对应的feature
if G_D_A > maxG_D_A:
maxG_D_A = G_D_A
maxFeature = feature
return maxFeature, maxG_D_A
2.3 信息增益比
以信息增益作为划分数据集的特征,存在偏向于选择取值较多的特征的问题。使用信息增益比(information gain ratio)可以对这个问题校正。也可以依据这个选择特征作为划分。
定义3 (信息增益比)
特征 $A$ 对训练数据集 $D$ 的信息增益比 $g_R\left(D,A\right)$,定义为其信息增益 $g\left(D,A\right)$ 与训练数据集 $D$ 关于特征 $A$ 的值的熵 $H_A\left(D\right)$ 之比,即
$$
g_R\left(D,A\right)=\cfrac{g\left(D,A\right)}{H_A\left(D\right)}
$$
其中,
$$
H_A\left( D \right) =-\sum_{i=1}^n{\frac{\left| D_i \right|}{\left| D \right|}\log _2}\frac{\left| D_i \right|}{\left| D \right|}
$$
$n$ 是特征 $A$ 取值的个数。
三、决策树的生成
3.1 ID3算法
ID3算法的核心是在决策树各个节点上应用信息增益准则选择特征